

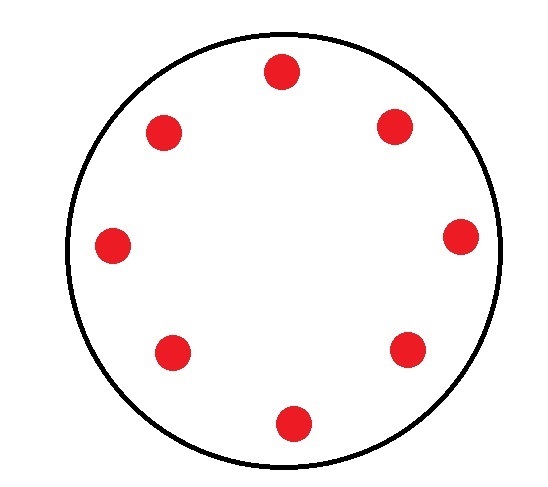
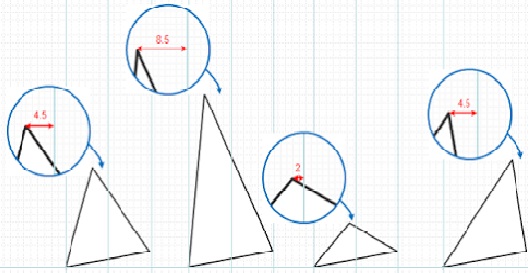
Кегельринг
Кегельринг
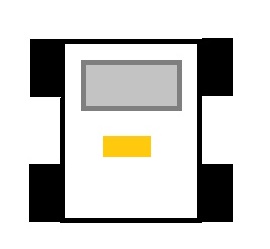
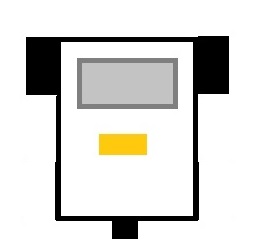
Особенности конструирования робота для движения по траектории
Черно-белое движение: использование двух датчиков

Движение робота вдоль стены: релейный регулятор
Движение робота вдоль стены: пропорциональный регулятор (П-регулятор)
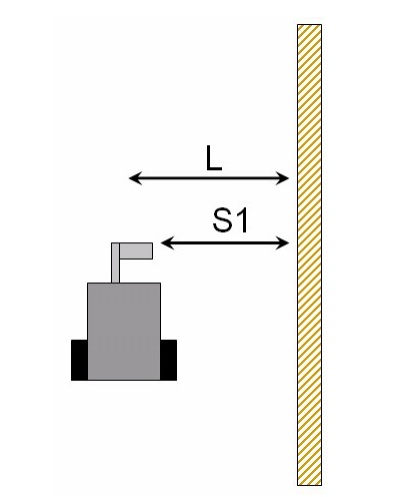
Движение робота вдоль стены: пропорционально-дифференциальный регулятор (ПД-регулятор )

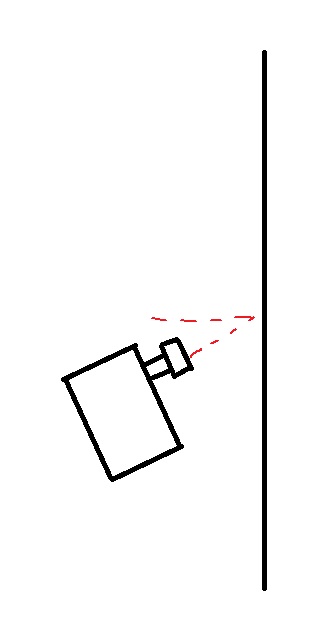
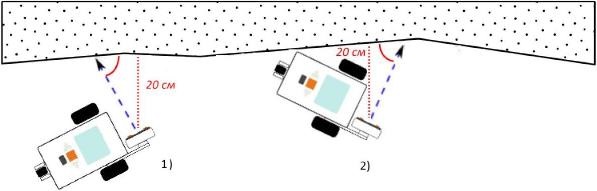
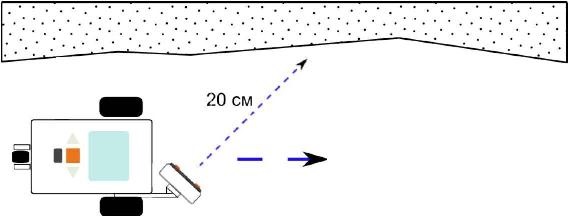
Конструирование робота для движения вдоль стены
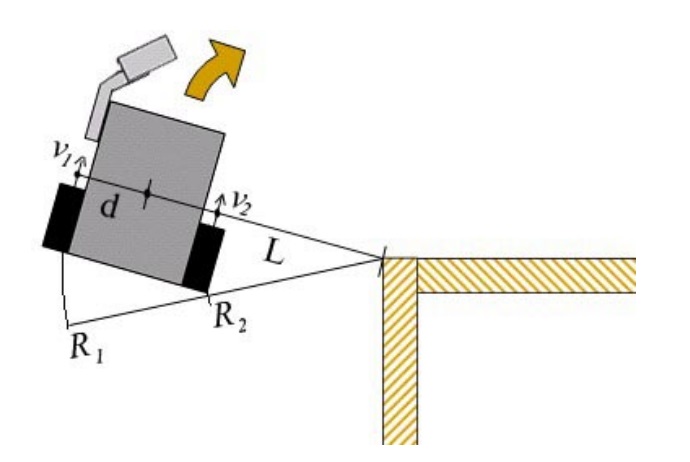
Поворот за угол








Юлия Сергеевна Пономарева